
La idea es la construcción de un porta-filtros motorizado y controlado por Arduino.
A partir de la experiencia previa, decido que podrá tener hasta 5 filtros, con estas combinaciones:
· Banda estrecha: 3 filtros: H-Alfa, O-III, S-II
· Color: Rojo, Verde, Azul (RGB)
A estas combinaciones de tres filtros cada una, es útil disponer de dos posiciones adicionales para los filtros:
· Luminancia (L): útil, además de para astrofotografía, para labores de fotometría
· Filtro anti-polución UHC: útil en el entorno contaminado de mi observatorio.
Diseño de la Rueda Porta-Filtros
Como se ve, disponer de 5 posiciones de filtros, resulta bastante cómodo, minimizando el desmontaje del porta-filtros para realizar el cambio de los mismos.
El otro factor que limitará el tamaño de la rueda porta-filtros es el diámetro de los filtros utilizados. Aquí tenemos básicamente dos posibilidades: 1,25” ó 2”, por motivo de las cámaras fotográficas utilizadas, optamos por el tamaño de 2”.
Teniendo ya estos dos factores claros, 5 posiciones y tamaño de filtro de 2”, empiezo por dibujar la rueda porta-filtros:
Para el diseño de las piezas, utilizo el programa SketchUp.
El primer paso será poder generar el engranaje a partir de unos diámetros dados. Como encuentro algo complicado dibujar engranajes con Sketchup, he recurrido a una herramienta externa para generarlos, en este caso es una herramienta online:
https://evolventdesign.com/pages/spur-gear-generator
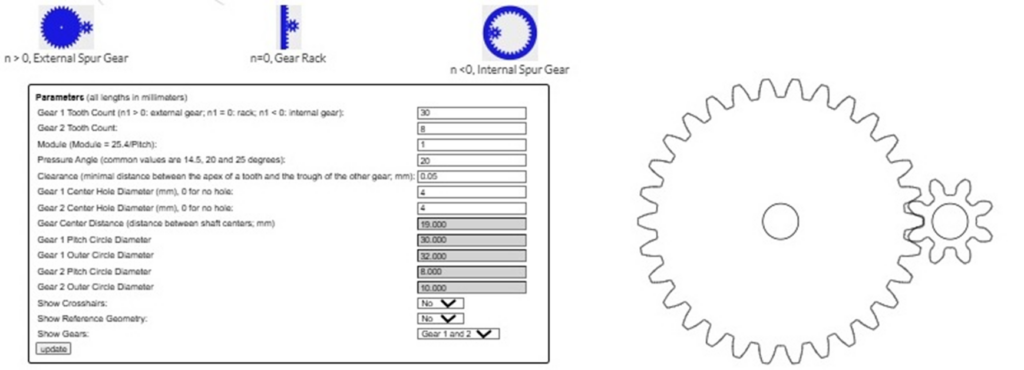
Esta herramienta permite exportar los dibujos de los engranajes en un formato estándar.
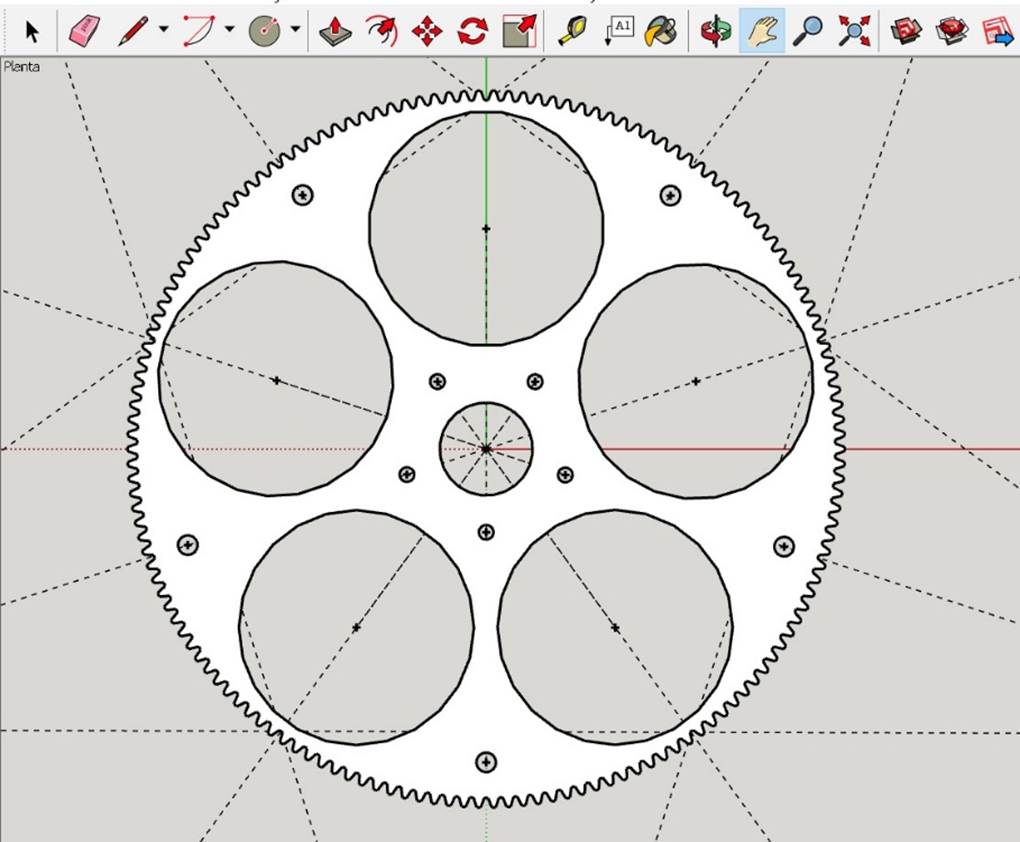
Es importante ensayar el tamaño del círculo de 2″ donde se ubicará cada filtro. En principio, trazamos un círculo de 50.2mm (2″), pero hay que ajustarlo hasta comprobar que el filtro entra bien y queda sujeto al mismo tiempo:

Con todo esto, ya estamos en disposición de hacer el primer diseño con Sketchup:
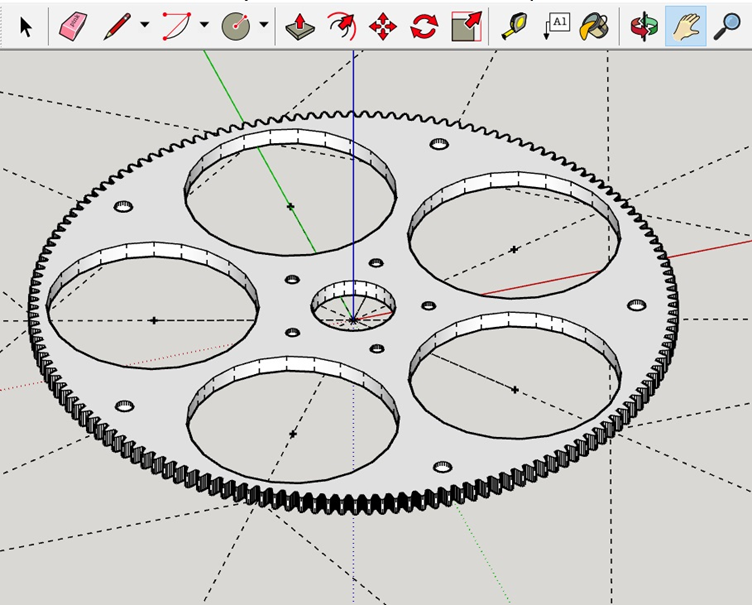
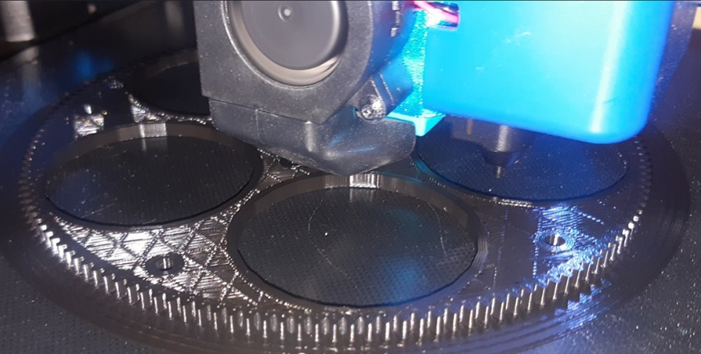
Como el material a emplear será el polímero PLA (típico en las impresiones 3D), le he dado a la rueda un espesor de 3 mm. Una vez exportado a formato STL, ya se puede preparar para realizar la impresión 3D. Abajo, una prueba de impresión de un primer prototipo de ajuste:
Motor y Controlador
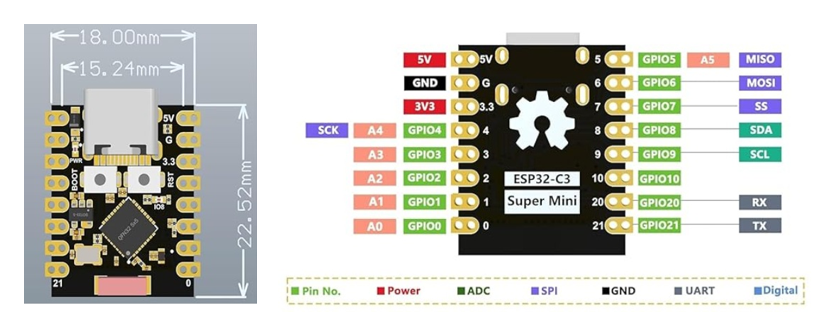
Como comentamos al principio, el control del Porta-filtros se hará mediante Arduino. Hemos elegido un modelo de unas dimensiones muy reducidas, no por ello menos versátil y potente:
ESP32-C3 Super Mini
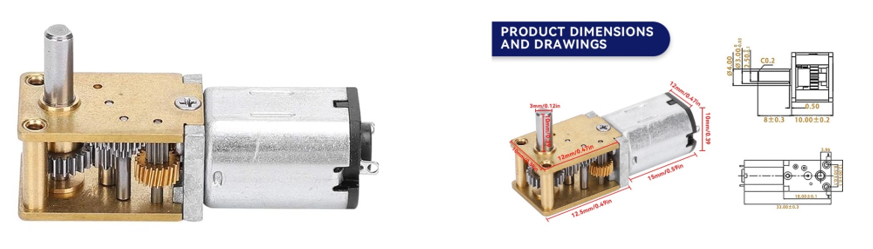
Para el grupo motor, se ha elegido un motor DC miniatura, con una reductora acodada, de manera que ocupe el menor espacio posible. En este caso, el motor funciona hasta un rango de 12v, con una reductora de 53 RPM:
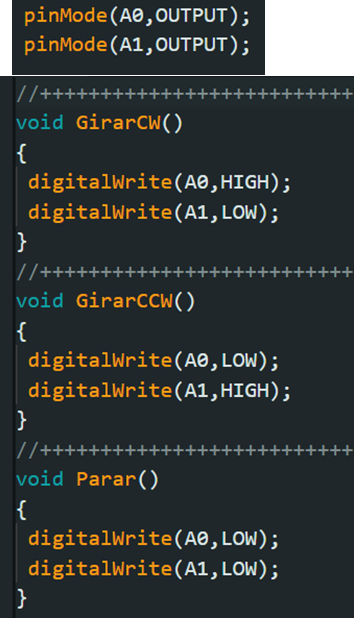
El controlador del motor DC es un DRV8833. Es capaz de controlar dos motores DC, con control de las dos direcciones de giro. Utilizaremos solamente una de las dos salidas:
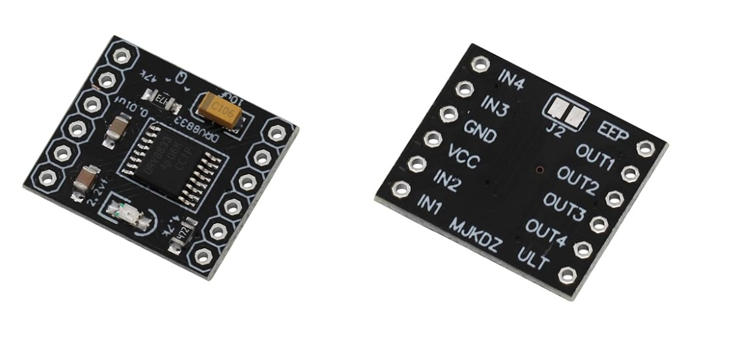
| IN1 | IN2 | Función |
| 0 | 0 | Parada |
| 0 | 1 | Girar CCW |
| 1 | 0 | Girar CW |
El montaje de los tres componentes quedaría así:
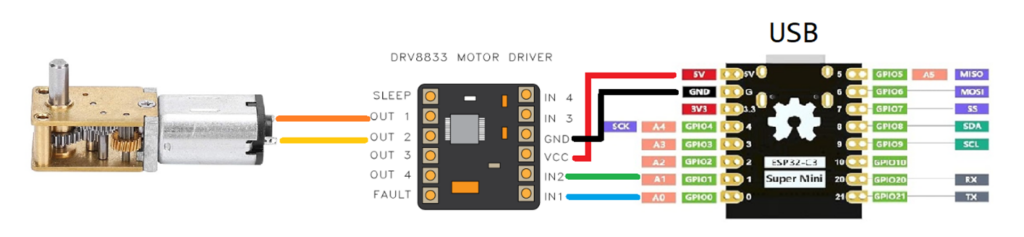
Según la tabla anterior, estos serían los tres procedimientos para actuar sobre el motor, se definen los pines A0, A1 como salidas:
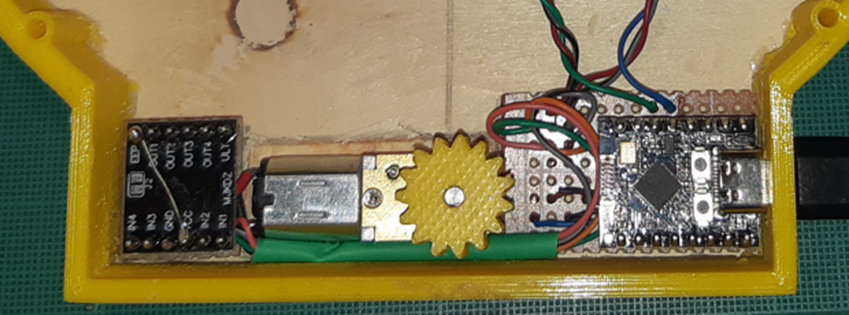
Detalle de los tres componentes ya instalados sobre el porta filtros.
El motor tiene también insertado el piñon que transmitirá el movimiento a la rueda porta filtros.
Llegados a este punto, tenemos el sistema para mover la rueda porta filtros, pero nos queda la parte para detectar la posición de la misma. Para esto, vamos a utilizar sensores de efecto Hall, junto con imanes permanentes, fijados a la rueda porta-filtros:
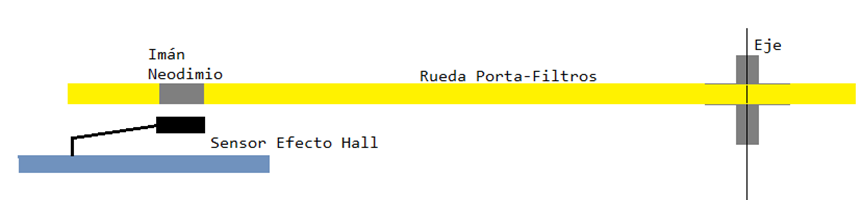
| En el dibujo de arriba, la rueda porta-filtros aparece de perfil, el imán de neodimio se situaría sobre el sensor de Efecto Hall y detectaría la posición. Abajo, la rueda vista desde arriba. Los imanes 1 y 3 sirven para detectar cada uno de los filtros, mientras que el imán 2, sirve para detectar la posición inicial. |

A continuación, se muestra el esquema del montaje electrónico completo:
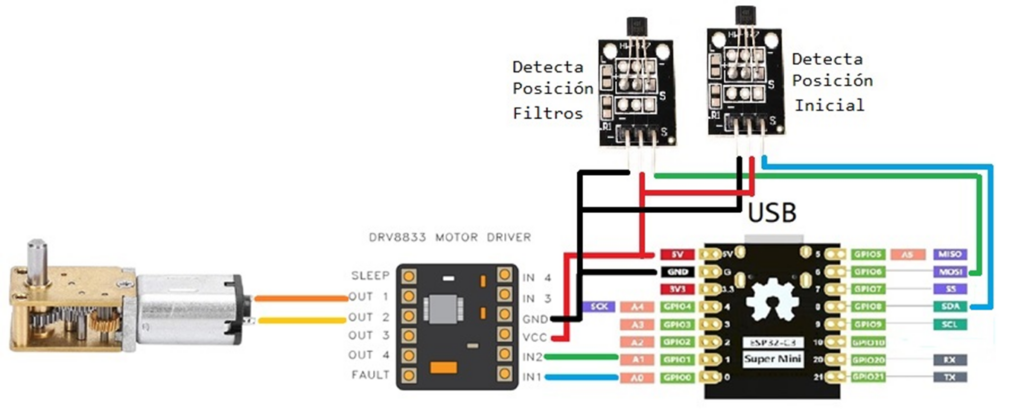
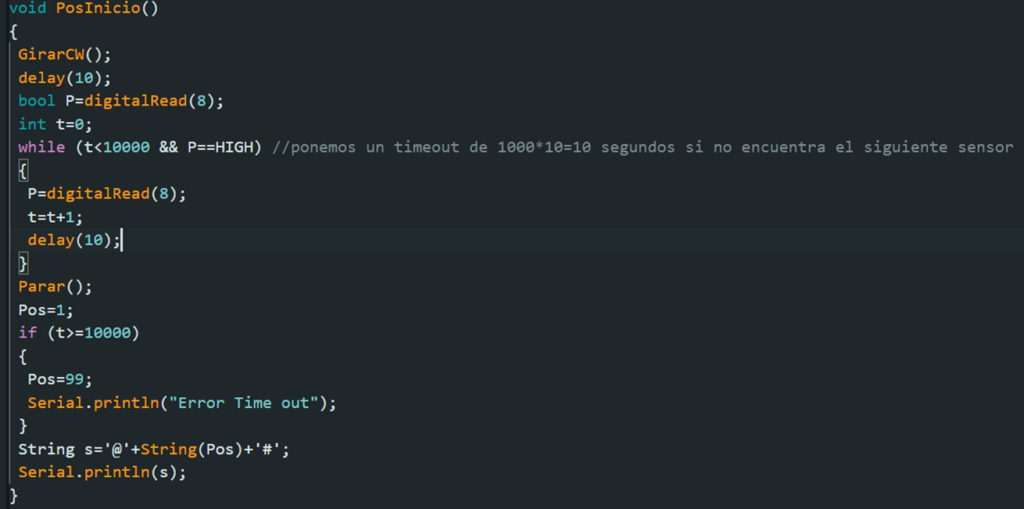
Ejemplo de programación del Arduino, en este caso para ir a la posición inicial. Aquí se ve que se hace uso de la entrada 8 del Arduino:
P=digitalRead(8);
Un valor alto (HIGH) en esta entrada significa que no se ha detectado la posición inicial y el motor sigue girando. Se detiene cuando P=0, o bien, en caso de time out, lo cual devolvería un error.
Diseño de la caja externa
A partir de la rueda porta-filtros ya diseñada, dibujamos la caja, teniendo también en cuenta el alojamiento de la circuitería:
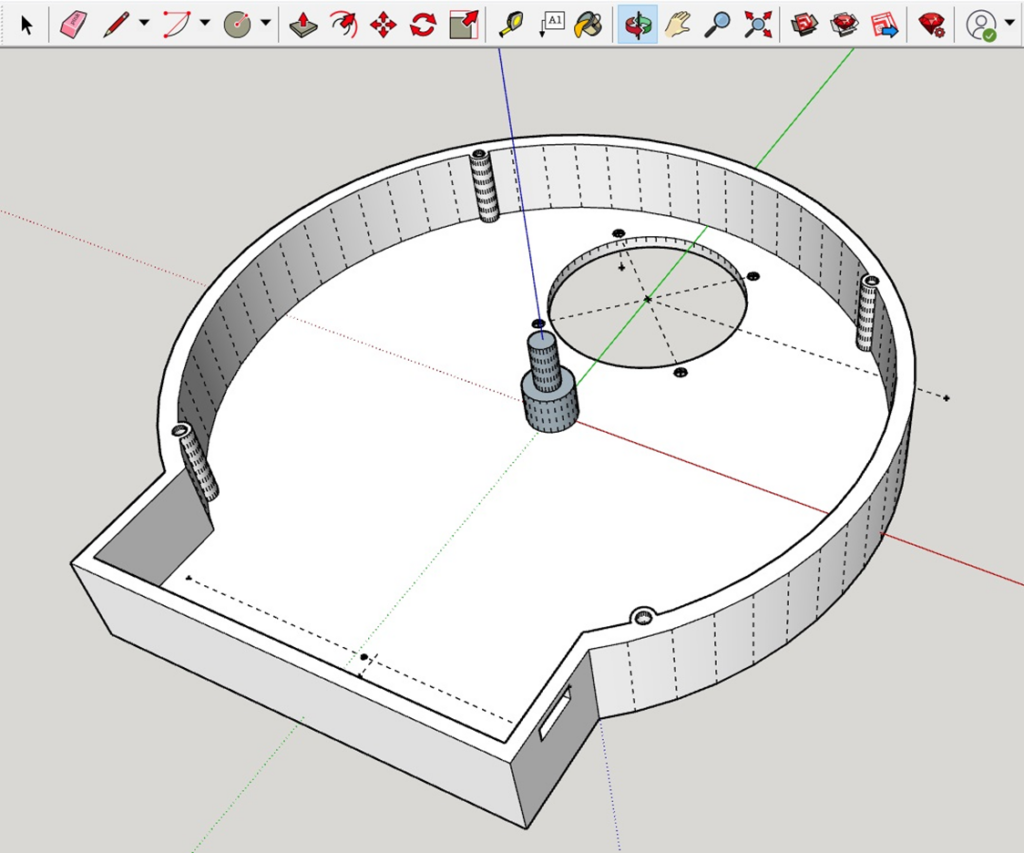
Hay que tener en cuenta también, el alojamiento de los detectores de efecto Hall, situados para que los imanes pasen por encima.
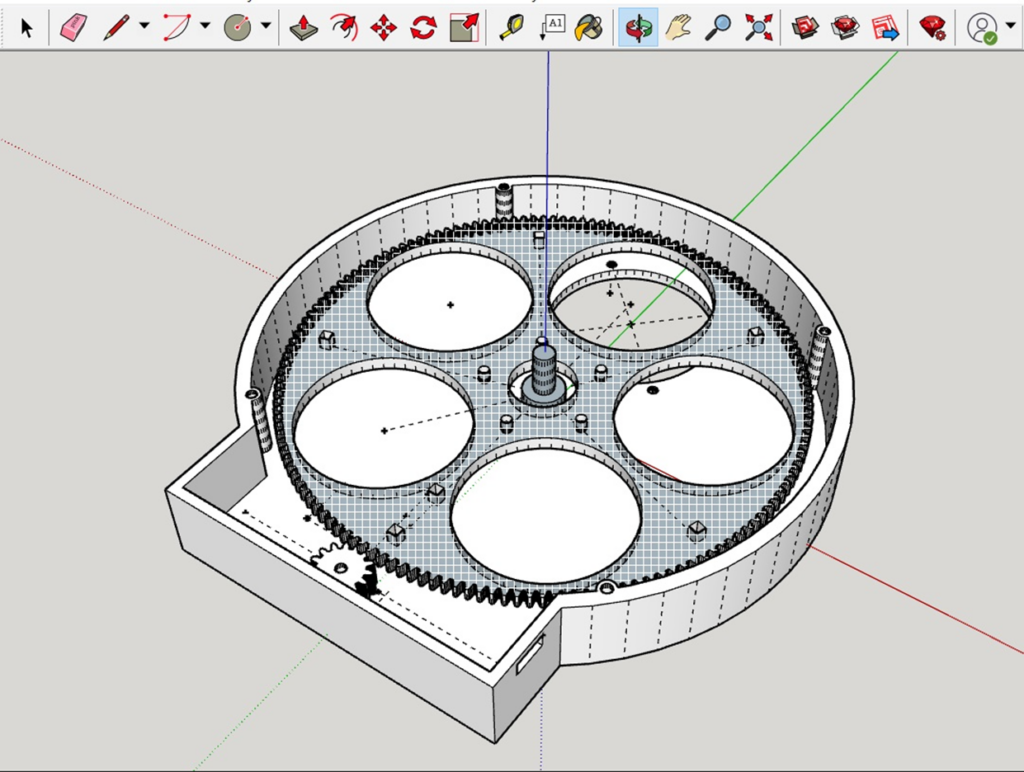
Finalmente, este es el aspecto del conjunto montado.

Abajo, el conjunto ya terminado, con la tapa puesta, que incorpora una salida para porta-oculares de 2”.
